15.1 Introduction
15.2 Transverse and longitudinal waves
15.3 Displacement relation in a progressive wave
15.4 The speed of a travelling wave
15.5 The principle of superposition of waves
15.6 Reflection of waves
15.7 Beats
15.8 Doppler effect
Summary
Points to ponder
Exercises
Additional exercises
In the previous Chapter, we studied the motion of objects oscillating in isolation. What happens in a system, which is a collection of such objects? A material medium provides such an example. Here, elastic forces bind the constituents to each other and, therefore, the motion of one affects that of the other. If you drop a little pebble in a pond of still water, the water surface gets disturbed. The disturbance does not remain confined to one place, but propagates outward along a circle. If you continue dropping pebbles in the pond, you see circles rapidly moving outward from the point where the water surface is disturbed. It gives a feeling as if the water is moving outward from the point of disturbance. If you put some cork pieces on the disturbed surface, it is seen that the cork pieces move up and down but do not move away from the centre of disturbance. This shows that the water mass does not flow outward with the circles, but rather a moving disturbance is created. Similarly, when we speak, the sound moves outward from us, without any flow of air from one part of the medium to another. The disturbances produced in air are much less obvious and only our ears or a microphone can detect them. These patterns, which move without the actual physical transfer or flow of matter as a whole, are called waves. In this Chapter, we will study such waves.
Waves transport energy and the pattern of disturbance has information that propagate from one point to another. All our communications essentially depend on transmission of signals through waves. Speech means production of sound waves in air and hearing amounts to their detection. Often, communication involves different kinds of waves. For example, sound waves may be first converted into an electric current signal which in turn may generate an electromagnetic wave that may be transmitted by an optical cable or via a satellite. Detection of the original signal will usually involve these steps in reverse order.
Not all waves require a medium for their propagation. We know that light waves can travel through vacuum. The light emitted by stars, which are hundreds of light years away, reaches us through inter-stellar space, which is practically a vacuum.
The most familiar type of waves such as waves on a string, water waves, sound waves, seismic waves, etc. is the so-called mechanical waves. These waves require a medium for propagation, they cannot propagate through vacuum. They involve oscillations of constituent particles and depend on the elastic properties of the medium. The electromagnetic waves that you will learn in Class XII are a different type of wave. Electromagnetic waves do not necessarily require a medium - they can travel through vacuum. Light, radiowaves, X-rays, are all electromagnetic waves. In vacuum, all electromagnetic waves have the same speed c, whose value is :
c = 299, 792, 458 ms–1. (15.1)
A third kind of wave is the so-called Matter waves. They are associated with constituents of matter : electrons, protons, neutrons, atoms and molecules. They arise in quantum mechanical description of nature that you will learn in your later studies. Though conceptually more abstract than mechanical or electro-magnetic waves, they have already found applications in several devices basic to modern technology; matter waves associated with electrons are employed in electron microscopes.
In this chapter we will study mechanical waves, which require a material medium for their propagation.
The aesthetic influence of waves on art and literature is seen from very early times; yet the first scientific analysis of wave motion dates back to the seventeenth century. Some of the famous scientists associated with the physics of wave motion are Christiaan Huygens (1629-1695), Robert Hooke and Isaac Newton. The understanding of physics of waves followed the physics of oscillations of masses tied to springs and physics of the simple pendulum. Waves in elastic media are intimately connected with harmonic oscillations. (Stretched strings, coiled springs, air, etc., are examples of elastic media). We shall illustrate this connection through simple examples.
Consider a collection of springs connected to one another as shown in Fig. 15.1. If the spring at one end is pulled suddenly and released, the disturbance travels to the other end. What has happened? The first spring is disturbed from its equilibrium length. Since the second spring is connected to the first, it is also stretched or compressed, and so on. The disturbance moves from one end to the other; but each spring only executes small oscillations about its equilibrium position. As a practical example of this situation, consider a stationary train at a railway station. Different bogies of the train are coupled to each other through a spring coupling. When an engine is attached at one end, it gives a push to the bogie next to it; this push is transmitted from one bogie to another without the entire train being bodily displaced.

Now let us consider the propagation of sound waves in air. As the wave passes through air, it compresses or expands a small region of air. This causes a change in the density of that region, say δρ, this change induces a change in pressure, δp, in that region. Pressure is force per unit area, so there is a restoring force proportional to the disturbance, just like in a spring. In this case, the quantity similar to extension or compression of the spring is the change in density. If a region is compressed, the molecules in that region are packed together, and they tend to move out to the adjoining region, thereby increasing the density or creating compression in the adjoining region. Consequently, the air in the first region undergoes rarefaction. If a region is comparatively rarefied the surrounding air will rush in making the rarefaction move to the adjoining region. Thus, the compression or rarefaction moves from one region to another, making the propagation of a disturbance possible in air.
In solids, similar arguments can be made. In a crystalline solid, atoms or group of atoms are arranged in a periodic lattice. In these, each atom or group of atoms is in equilibrium, due to forces from the surrounding atoms. Displacing one atom, keeping the others fixed, leads to restoring forces, exactly as in a spring. So we can think of atoms in a lattice as end points, with springs between pairs of them.
In the subsequent sections of this chapter we are going to discuss various characteristic properties of waves.
We have seen that motion of mechanical waves involves oscillations of constituents of the medium. If the constituents of the medium oscillate perpendicular to the direction of wave propagation, we call the wave a transverse wave. If they oscillate along the direction of wave propagation, we call the wave a longitudinal wave.
Fig.15.2 shows the propagation of a single pulse along a string, resulting from a single up and down jerk. If the string is very long compared to the size of the pulse, the pulse will damp out before it reaches the other end and reflection from that end may be ignored. Fig. 15.3 shows a similar situation, but this time the external agent gives a continuous periodic sinusoidal up and down jerk to one end of the string. The resulting disturbance on the string is then a sinusoidal wave. In either case the elements of the string oscillate about their equilibrium mean position as the pulse or wave passes through them. The oscillations are normal to the direction of wave motion along the string, so this is an example of transverse wave.
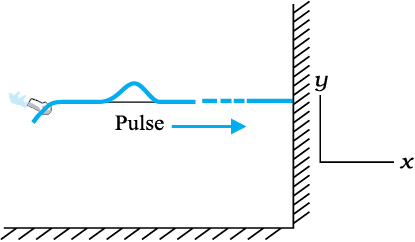
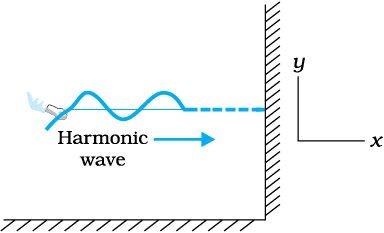
Fig. 15.3 A harmonic (sinusoidal) wave travelling along a stretched string is an example of a transverse wave. An element of the string in the region of the wave oscillates about its equilibrium position perpendicular to the direction of wave propagation.
We can look at a wave in two ways. We can fix an instant of time and picture the wave in space. This will give us the shape of the wave as a whole in space at a given instant. Another way is to fix a location i.e. fix our attention on a particular element of string and see its oscillatory motion in time.
Fig. 15.4 describes the situation for longitudinal waves in the most familiar example of the propagation of sound waves. A long pipe filled with air has a piston at one end. A single sudden push forward and pull back of the piston will generate a pulse of condensations (higher density) and rarefactions (lower density) in the medium (air). If the push-pull of the piston is continuous and periodic (sinusoidal), a sinusoidal wave will be generated propagating in air along the length of the pipe. This is clearly an example of longitudinal waves.
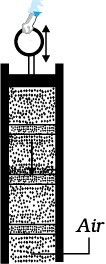
Fig. 15.4 Longitudinal waves (sound) generated in a pipe filled with air by moving the piston up and down. A volume element of air oscillates in the direction parallel to the direction of wave propagation.
The waves considered above, transverse or longitudinal, are travelling or progressive waves since they travel from one part of the medium to another. The material medium as a whole does not move, as already noted. A stream, for example, constitutes motion of water as a whole. In a water wave, it is the disturbance that moves, not water as a whole. Likewise a wind (motion of air as a whole) should not be confused with a sound wave which is a propagation of disturbance (in pressure density) in air, without the motion of air medium as a whole.
Mechanical waves are related to the elastic properties of the medium. In transverse waves, the constituents of the medium oscillate perpendicular to wave motion causing change is shape. That is, each element of the medium in subject to shearing stress. Solids and strings have shear modulus, that is they sustain shearing stress. Fluids have no shape of their own - they yield to shearing stress. This is why transverse waves are possible in solids and strings (under tension) but not in fluids. However, solids as well as fluids have bulk modulus, that is, they can sustain compressive strain. Since longitudinal waves involve compressive stress (pressure), they can be propagated through solids and fluids. Thus a steel bar possessing both bulk and sheer elastic moduli can propagate longitudinal as well as transverse waves. But air can propagate only longitudinal pressure waves (sound). When a medium such as a steel bar propagates both longitudinal and transverse waves, their speeds can be different since they arise from different elastic moduli.
Example 15.1 Given below are some examples of wave motion. State in each case if the wave motion is transverse, longitudinal or a combination of both:
(a) Motion of a kink in a longitudinal spring produced by displacing one end of the spring sideways.
(b) Waves produced in a cylinder containing a liquid by moving its piston back and forth.
(c) Waves produced by a motorboat sailing in water.
(d) Ultrasonic waves in air produced by a vibrating quartz crystal.
Answer
(a) Transverse and longitudinal
(b) Longitudinal
(c) Transverse and longitudinal
(d) Longitudinal
For mathematical description of a travelling wave, we need a function of both position x and time t. Such a function at every instant should give the shape of the wave at that instant. Also, at every given location, it should describe the motion of the constituent of the medium at that location. If we wish to describe a sinusoidal travelling wave (such as the one shown in Fig. 15.3) the corresponding function must also be sinusoidal. For convenience, we shall take the wave to be transverse so that if the position of the constituents of the medium is denoted by x, the displacement from the equilibrium position may be denoted by y. A sinusoidal travelling wave is then described by:
 (15.2)
(15.2)
The term φ in the argument of sine function means equivalently that we are considering a linear combination of sine and cosine functions:
 (15.3)
(15.3)
From Equations (15.2) and (15.3),
 and
and 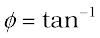

To understand why Equation (15.2) represents a sinusoidal travelling wave, take a fixed instant, say t = t0. Then, the argument of the sine function in Equation (15.2) is simply kx + constant. Thus, the shape of the wave (at any fixed instant) as a function of  is a sine wave. Similarly, take a fixed location, say x = x0. Then, the argument of the sine function in Equation (15.2) is constant -ωt. The displacement y, at a fixed location, thus, varies sinusoidally with time. That is, the constituents of the medium at different positions execute simple harmonic motion. Finally, as t increases, x must increase in the positive direction to keep kx – ωt + φ constant. Thus, Eq. (15.2) represents a sinusiodal (harmonic) wave travelling along the positive direction of the x-axis. On the other hand, a function
is a sine wave. Similarly, take a fixed location, say x = x0. Then, the argument of the sine function in Equation (15.2) is constant -ωt. The displacement y, at a fixed location, thus, varies sinusoidally with time. That is, the constituents of the medium at different positions execute simple harmonic motion. Finally, as t increases, x must increase in the positive direction to keep kx – ωt + φ constant. Thus, Eq. (15.2) represents a sinusiodal (harmonic) wave travelling along the positive direction of the x-axis. On the other hand, a function
 (15.4) represents a wave travelling in the negative direction of x-axis. Fig. (15.5) gives the names of the various physical quantities appearing in Eq. (15.2) that we now interpret.
(15.4) represents a wave travelling in the negative direction of x-axis. Fig. (15.5) gives the names of the various physical quantities appearing in Eq. (15.2) that we now interpret.
y(x,t) : displacement as a function of position x and time t
a : amplitude of a wave
ω : angular frequency of the wave
k : angular wave number
kx–ωt+φ : initial phase angle (a+x = 0, t = 0)
Fig. 15.5 The meaning of standard symbols in Eq. (15.2)
Fig. 15.6 shows the plots of Eq. (15.2) for different values of time differing by equal intervals of time. In a wave, the crest is the point of maximum positive displacement, the trough is the point of maximum negative displacement. To see how a wave travels, we can fix attention on a crest and see how it progresses with time. In the figure, this is shown by a cross (×) on the crest. In the same manner, we can see the motion of a particular constituent of the medium at a fixed location, say at the origin of the x-axis. This is shown by a solid dot (•). The plots of Fig. 15.6 show that with time, the solid dot (•) at the origin moves periodically, i.e., the particle at the origin oscillates about its mean position as the wave progresses. This is true for any other location also. We also see that during the time the solid dot (•) has completed one full oscillation, the crest has moved further by a certain distance.
Using the plots of Fig. 15.6, we now define the various quantities of Eq. (15.2).
The quantity (kx – ωt + φ) appearing as the argument of the sine function in Eq. (15.2) is called the phase of the wave. Given the amplitude a, the phase determines the displacement of the wave at any position and at any instant. Clearly φ is the phase at x = 0 and t = 0. Hence, φ is called the initial phase angle. By suitable choice of origin on the x-axis and the intial time, it is possible to have φ = 0. Thus there is no loss of generality in dropping φ, i.e., in taking Eq. (15.2) with φ = 0.
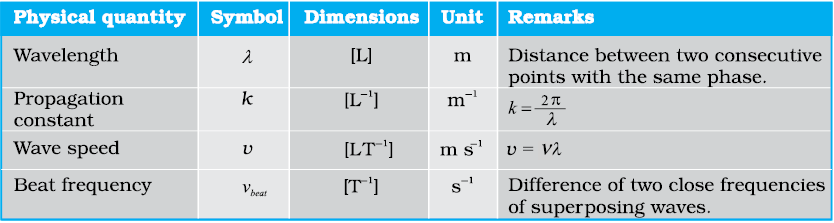
The minimum distance between two points having the same phase is called the wavelength of the wave, usually denoted by λ. For simplicity, we can choose points of the same phase to be crests or troughs. The wavelength is then the distance between two consecutive crests or troughs in a wave. Taking φ = 0 in Eq. (15.2), the displacement at t = 0 is given by
 (15.5)
(15.5)
Since the sine function repeats its value after every 2π change in angle,

That is the displacements at points x and at

are the same, where n=1,2,3,... The 1east distance between points with the same displacement (at any given instant of time) is obtained by taking n = 1.  is then given by
is then given by
 or
or  (15.6)
(15.6)
k is the angular wave number or propagation constant; its SI unit is radian per metre or  *
*
Fig. 15.7 shows again a sinusoidal plot. It describes not the shape of the wave at a certain instant but the displacement of an element (at any fixed location) of the medium as a function of time. We may for, simplicity, take Eq. (15.2) with φ = 0 and monitor the motion of the element say at  . We then get
. We then get

Now, the period of oscillation of the wave is the time it takes for an element to complete one full oscillation. That is


Since sine function repeats after every  ,
,
 or
or  (15.7)
(15.7)
 is called the angular frequency of the wave. Its SI unit is rad s –1. The frequency ν is the number of oscillations per second. Therefore,
is called the angular frequency of the wave. Its SI unit is rad s –1. The frequency ν is the number of oscillations per second. Therefore,
 (15.8)
(15.8)
 is usually measured in hertz.
is usually measured in hertz.
In the discussion above, reference has always been made to a wave travelling along a string or a transverse wave. In a longitudinal wave, the displacement of an element of the medium is parallel to the direction of propagation of the wave. In Eq. (15.2), the displacement function for a longitudinal wave is written as,
s(x, t) = a sin (kx – ωt + φ) (15.9)
where s(x, t) is the displacement of an element of the medium in the direction of propagation of the wave at position x and time t. In Eq. (15.9), a is the displacement amplitude; other quantities have the same meaning as in case of a transverse wave except that the displacement function y (x, t) is to be replaced by the function s (x, t).
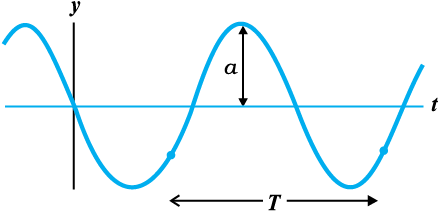
Fig. 15.7 An element of a string at a fixed location oscillates in time with amplitude a and period T, as the wave passes over it.
* Here again, ‘radian’ could be dropped and the units could be written merely as m–1. Thus, k represents 2π times the number of waves (or the total phase difference) that can be accommodated per unit length, with SI units m–1.
Example 15.2 A wave travelling along a string is described by,
y(x, t) = 0.005 sin (80.0 x – 3.0 t),
in which the numerical constants are in SI units (0.005 m, 80.0 rad m–1, and 3.0 rad s–1). Calculate (a) the amplitude, (b) the wavelength, and (c) the period and frequency of the wave. Also, calculate the displacement y of the wave at a distance x = 30.0 cm and time t = 20 s ?
Answer
On comparing this displacement equation with Eq. (15.2),
y (x, t) = a sin (kx – ωt),
we find
(a) the amplitude of the wave is 0.005 m = 5 mm.
(b) the angular wave number k and angular frequency ω are
k = 80.0 m–1 and ω = 3.0 s–1
We, then, relate the wavelength λ to k through Eq. (15.6),
λ = 2π/k
= 7.85 cm
(c) Now, we relate T to ω by the relation
T = 2π/ω
= 2.09 s
and frequency, v = 1/T = 0.48 Hz
The displacement y at x = 30.0 cm and
time t = 20 s is given by
y = (0.005 m) sin (80.0 × 0.3 – 3.0 × 20)
= (0.005 m) sin (–36 + 12π)
= (0.005 m) sin (1.699)
To determine the speed of propagation of a travelling wave, we can fix our attention on any particular point on the wave (characterised by some value of the phase) and see how that point moves in time. It is convenient to look at the motion of the crest of the wave. Fig. 15.8 gives the shape of the wave at two instants of time, which differ by a small time internal ∆t. The entire wave pattern is seen to shift to the right (positive direction of x-axis) by a distance ∆x. In particular, the crest shown by a dot ( ) moves a
) moves a
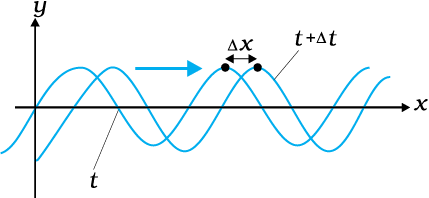
distance ∆x in time ∆t. The speed of the wave is then ∆x/∆t. We can put the dot () on a point with any other phase. It will move with the same speed v (otherwise the wave pattern will not remain fixed). The motion of a fixed phase point on the wave is given by
kx – ωt = constant (15.10)
Thus, as time t changes, the position x of the fixed phase point must change so that the phase remains constant. Thus,
kx – ωt = k(x+∆x) – ω(t+∆t)
or k ∆x – ω ∆t =0
Taking ∆x, ∆t vanishingly small, this gives
 (15.11)
(15.11)
Relating ω to T and k to λ, we get
 (15.12)
(15.12)
Eq. (15.12), a general relation for all progressive waves, shows that in the time required for one full oscillation by any constituent of the medium, the wave pattern travels a distance equal to the wavelength of the wave. It should be noted that the speed of a mechanical wave is determined by the inertial (linear mass density for strings, mass density in general) and elastic properties (Young’s modulus for linear media/ shear modulus, bulk modulus) of the medium. The medium determines the speed; Eq. (15.12) then relates wavelength to frequency for the given speed. Of course, as remarked earlier, the medium can support both transverse and longitudinal waves, which will have different speeds in the same medium. Later in this chapter, we shall obtain specific expressions for the speed of mechanical waves in some media.
The speed of a mechanical wave is determined by the restoring force setup in the medium when it is disturbed and the inertial properties (mass density) of the medium. The speed is expected to be directly related to the former and inversely to the latter. For waves on a string, the restoring force is provided by the tension T in the string. The inertial property will in this case be linear mass density µ, which is mass m of the string divided by its length L. Using Newton’s Laws of Motion, an exact formula for the wave speed on a string can be derived, but this derivation is outside the scope of this book. We shall, therefore, use dimensional analysis. We already know that dimensional analysis alone can never yield the exact formula. The overall dimensionless constant is always left undetermined by dimensional analysis.
The dimension of µ is [ML–1] and that of T is like force, namely [MLT–2]. We need to combine these dimensions to get the dimension of speed v [LT–1]. Simple inspection shows that the quantity T/µ has the relevant dimension
Thus if T and µ are assumed to be the only relevant physical quantities,
v = C (15.13)
where C is the undetermined constant of dimensional analysis. In the exact formula, it turms out, C=1. The speed of transverse waves on a stretched string is given by
v = (15.14)
Note the important point that the speed v depends only on the properties of the medium T and µ (T is a property of the stretched string arising due to an external force). It does not depend on wavelength or frequency of the wave itself. In higher studies, you will come across waves whose speed is not independent of frequency of the wave. Of the two parameters λ and ν the source of disturbance determines the frequency of the wave generated. Given the speed of the wave in the medium and the frequency Eq. (15.12) then fixes the wavelength
 (15.15)
(15.15)
Propagation of a pulse on a rope
You can easily see the motion of a pulse on a rope. You can also see its reflection from a rigid boundary and measure its velocity of travel. You will need a rope of diameter 1 to 3 cm, two hooks and some weights. You can perform this experiment in your classroom or laboratory.
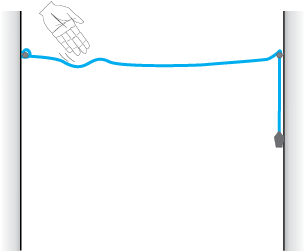
Take a long rope or thick string of diameter 1 to 3 cm, and tie it to hooks on opposite walls in a hall or laboratory. Let one end pass on a hook and hang some weight (about 1 to 5 kg) to it. The walls may be about 3 to 5 m apart.
Take a stick or a rod and strike the rope hard at a point near one end. This creates a pulse on the rope which now travels on it. You can see it reaching the end and reflecting back from it. You can check the phase relation between the incident pulse and reflected pulse. You can easily watch two or three reflections before the pulse dies out. You can take a stopwatch and find the time for the pulse to travel the distance between the walls, and thus measure its velocity. Compare it with that obtained from Eq. (15.14).
This is also what happens with a thin metallic string of a musical instrument. The major difference is that the velocity on a string is fairly high because of low mass per unit length, as compared to that on a thick rope. The low velocity on a rope allows us to watch the motion and make measurements beautifully.
Example 15.3 A steel wire 0.72 m long has a mass of 5.0 ×10–3 kg. If the wire is under a tension of 60 N, what is the speed of transverse waves on the wire ?
Answer
Mass per unit length of the wire,
= 6.9 ×10–3 kg m–1
Tension, T = 60 N
The speed of wave on the wire is given by
In a longitudinal wave, the constituents of the medium oscillate forward and backward in the direction of propagation of the wave. We have already seen that the sound waves travel in the form of compressions and rarefactions of small volume elements of air. The elastic property that determines the stress under compressional strain is the bulk modulus of the medium defined by (see Chapter 9)
 (15.16)
(15.16)
Here, the change in pressure ∆P produces a volumetric strain . B has the same dimension as pressure and given in SI units in terms of pascal (Pa). The inertial property relevant for the propagation of wave is the mass density ρ, with dimensions [ML–3]. Simple inspection reveals that quantity B/ρ has the relevant dimension:
 (15.17)
(15.17)
Thus, if B and are considered to be the only relevant physical quantities,
v = C (15.18)
where, as before, C is the undetermined constant from dimensional analysis. The exact derivation shows that C=1. Thus, the general formula for longitudinal waves in a medium is:
v = (15.19)
For a linear medium, like a solid bar, the lateral expansion of the bar is negligible and we may consider it to be only under longitudinal strain. In that case, the relevant modulus of elasticity is Young’s modulus, which has the same dimension as the Bulk modulus. Dimensional analysis for this case is the same as before and yields a relation like Eq. (15.18), with an undetermined C, which the exact derivation shows to be unity. Thus, the speed of longitudinal waves in a solid bar is given by
v = (15.20)
where Y is the Young’s modulus of the material of the bar. Table 15.1 gives the speed of sound in some media.
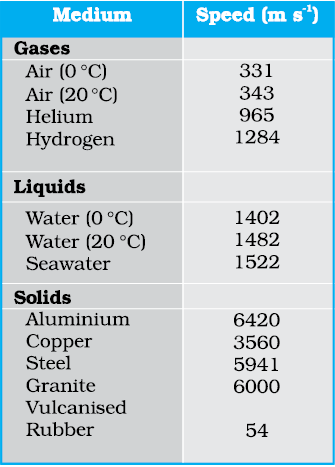
Liquids and solids generally have higher speed of sound than gases. [Note for solids, the speed being referred to is the speed of longitudinal waves in the solid]. This happens because they are much more difficult to compress than gases and so have much higher values of bulk modulus. Now, see Eq. (15.19). Solids and liquids have higher mass densities ( ) than gases. But the corresponding increase in both the modulus (B) of solids and liquids is much higher. This is the reason why the sound waves travel faster in solids and liquids.
) than gases. But the corresponding increase in both the modulus (B) of solids and liquids is much higher. This is the reason why the sound waves travel faster in solids and liquids.
We can estimate the speed of sound in a gas in the ideal gas approximation. For an ideal gas, the pressure P, volume V and temperature T are related by (see Chapter 11).
PV = NkBT (15.21)
where N is the number of molecules in volume V, kB is the Boltzmann constant and T the temperature of the gas (in Kelvin). Therefore, for an isothermal change it follows from Eq.(15.21) that
V∆P + P∆V = 0
or 
Hence, substituting in Eq. (15.16), we have
B = P
Therefore, from Eq. (15.19) the speed of a longitudinal wave in an ideal gas is given by,
v = (15.22)
This relation was first given by Newton and is known as Newton’s formula.
Example 15.4 Estimate the speed of sound in air at standard temperature and pressure. The mass of 1 mole of air is 29.0×10–3 kg.
Answer We know that 1 mole of any gas occupies 22.4 litres at STP. Therefore, density of air at STP is:
ρo = (mass of one mole of air)/ (volume of one
mole of air at STP)
= 1.29 kg m–3
According to Newton’s formula for the speed of sound in a medium, we get for the speed of sound in air at STP,
 = 280 ms–1 (15.23)
= 280 ms–1 (15.23)
The result shown in Eq.(15.23) is about 15% smaller as compared to the experimental value of 331 ms–1 as given in Table 15.1. Where
did wegowrong ? Ifweexaminethebasic assumption made by Newton that the pressure variations in a medium during propagation of sound are isothermal, we find that this is not correct. It was pointed out by Laplace that the pressure variations in the propagation of sound waves are so fast that there is little time for the heat flow to maintain constant temperature. These variations, therefore, are adiabatic and not isothermal. For adiabatic processes the ideal gas satisfies the relation (see Section 12.8),
PVγ = constant
i.e. ∆(PVγ ) = 0
or Pγ V γ –1 ∆V + Vγ ∆P = 0
where γ is the ratio of two specific heats,
Cp/Cv.
Thus, for an ideal gas the adiabatic bulk modulus is given by,
Bad =
= γP
The speed of sound is, therefore, from Eq. (15.19), givenby,
v = (15.24)
This modification of Newton’s formula is referred to as the Laplace correction. For air γ = 7/5. Now using Eq. (15.24) to estimate the speed of sound in air at STP, we get a value 331.3 m s–1, which agrees with the measured speed.
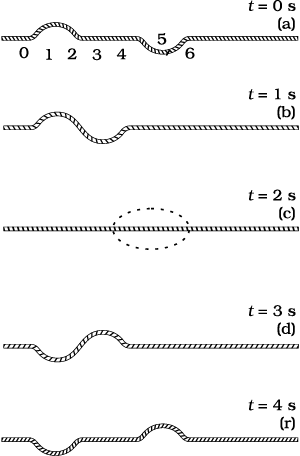
What happens when two wave pulses travelling in opposite directions cross each other
(Fig. 15.9)? It turns out that wave pulses continue to retain their identities after they have crossed. However, during the time they overlap, the wave pattern is different from either of the pulses. Figure 15.9 shows the situation when two pulses of equal and opposite shapes move towards each other. When the pulses overlap, the resultant displacement is the algebraic sum of the displacement due to each pulse. This is known as the principle of superposition of waves.
According to this principle, each pulse moves as if others are not present. The constituents of the medium, therefore, suffer displacments due to both and since the displacements can be positive and negative, the net displacement is an algebraic sum of the two. Fig. 15.9 gives graphs of the wave shape at different times. Note the dramatic effect in the graph (c); the displacements due to the two pulses have exactly cancelled each other and there is zero displacement throughout.
To put the principle of superposition mathematically, let y1(x,t) and y2(x,t) be the displacements due to two wave disturbances in the medium. If the waves arrive in a region simultaneously, and therefore, overlap, the net displacement y (x,t) is given by
y (x, t) = y1(x, t) + y2(x, t) (15.25)
If we have two or more waves moving in the medium the resultant waveform is the sum of wave functions of individual waves. That is, if the wave functions of the moving waves are
y1 = f1(x–vt),
y2 = f2(x–vt),
..........
..........
yn = fn (x–vt)
then the wave function describing the disturbance in the medium is
y = f1(x – vt)+ f2(x – vt)+ ...+ fn(x – vt)
 (15.26)
(15.26)
The principle of superposition is basic to the phenomenon of interference.
For simplicity, consider two harmonic travelling waves on a stretched string, both with the same ω (angular frequency) and k (wave number), and, therefore, the same wavelength λ. Their wave speed will be identical. Let us further assume that their amplitudes are equal and they are both travelling in the positive direction of x-axis. The waves only differ in their initial phase. According to Eq. (15.2), the two waves are described by the functions:
y1(x, t) = a sin (kx – ωt) (15.27)
and y2(x, t) = a sin (kx – ωt + φ ) (15.28)
The net displacement is then, by the principle of superposition, given by
y (x, t) = a sin (kx – ωt) + a sin (kx – ωt + φ) (15.29)
 (15.30)
(15.30)
where we have used the familiar trignometric identity for  . We then have
. We then have
 (15.31)
(15.31)
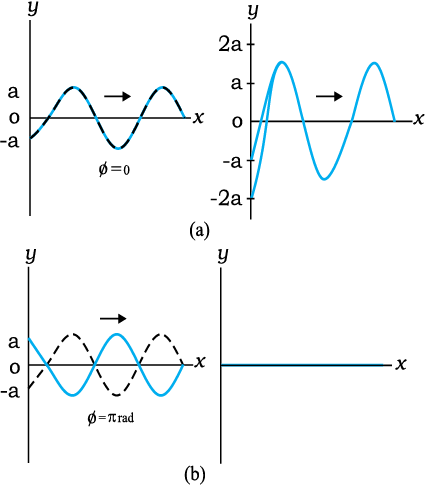
Eq. (15.31) is also a harmonic travelling wave in the positive direction of x-axis, with the same frequency and wavelength. However, its initial phase angle is  . The significant thing is that its amplitude is a function of the phase difference φ between the constituent two waves:
. The significant thing is that its amplitude is a function of the phase difference φ between the constituent two waves:
A(φ) = 2a cos φ/2 (15.32)
For φ = 0, when the waves are in phase,
 (15.33)
(15.33)
i.e., the resultant wave has amplitude 2a, the largest possible value for A. For  , the waves are completely, out of phase and the resultant wave has zero displacement everywhere at all times
, the waves are completely, out of phase and the resultant wave has zero displacement everywhere at all times
y (x, t) = 0 (15.34)
Eq. (15.33) refers to the so-called constructive interference of the two waves where the amplitudes add up in the resultant wave. Eq. (15.34) is the case of destructive intereference where the amplitudes subtract out in the resultant wave. Fig. 15.10 shows these two cases of interference of waves arising from the principle of superposition.
So far we considered waves propagating in an unbounded medium. What happens if a pulse or a wave meets a boundary? If the boundary is rigid, the pulse or wave gets reflected. The phenomenon of echo is an example of reflection by a rigid boundary. If the boundary is not completely rigid or is an interface between two different elastic media, the situation is some what complicated. A part of the incident wave is reflected and a part is transmitted into the second medium. If a wave is incident obliquely on the boundary between two different media the transmitted wave is called the refracted wave. The incident and refracted waves obey Snell’s law of refraction, and the incident and reflected waves obey the usual laws of reflection.
Fig. 15.11 shows a pulse travelling along a stretched string and being reflected by the boundary. Assuming there is no absorption of energy by the boundary, the reflected wave has the same shape as the incident pulse but it suffers a phase change of π or 1800 on reflection. This is because the boundary is rigid and the disturbance must have zero displacement at all times at the boundary. By the principle of superposition, this is possible only if the reflected and incident waves differ by a phase of π, so that the resultant displacement is zero. This reasoning is based on boundary condition on a rigid wall. We can arrive at the same conclusion dynamically also. As the pulse arrives at the wall, it exerts a force on the wall. By Newton’s Third Law, the wall exerts an equal and opposite force on the string generating a reflected pulse that differs by a phase of π.
If on the other hand, the boundary point is not rigid but completely free to move (such as in the case of a string tied to a freely moving ring on a rod), the reflected pulse has the same phase and amplitude (assuming no energy dissipation) as the incident pulse. The net maximum displacement at the boundary is then twice the amplitude of each pulse. An example of non- rigid boundary is the open end of an organ pipe.
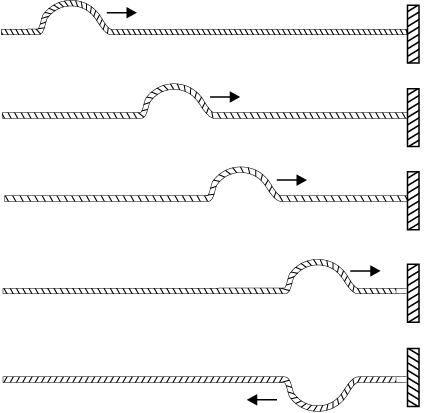
Fig. 15.11 Reflection of a pulse meeting a rigid boundary.
To summarise, a travelling wave or pulse suffers a phase change of π on reflection at a rigid boundary and no phase change on reflection at an open boundary. To put this mathematically, let the incident travelling wave be

At a rigid boundary, the reflected wave is given by
yr(x, t) = a sin (kx – ωt + π).
= – a sin (kx – ωt) (15.35)
At an open boundary, the reflected wave is given by
yr(x, t) = a sin (kx – ωt + 0).
= a sin (kx – ωt) (15.36)
Clearly, at the rigid boundary,  at all times.
at all times.
We considered above reflection at one boundary. But there are familiar situations (a string fixed at either end or an air column in a pipe with either end closed) in which reflection takes place at two or more boundaries. In a string, for example, a wave travelling in one direction will get reflected at one end, which in turn will travel and get reflected from the other end. This will go on until there is a steady wave pattern set up on the string. Such wave patterns are called standing waves or stationary waves. To see this mathematically, consider a wave travelling along the positive direction of x-axis and a reflected wave of the same amplitude and wavelength in the negative direction of x-axis. From Eqs. (15.2) and (15.4), with φ = 0, we get:
y1(x, t) = a sin (kx – ωt)
y2(x, t) = a sin (kx + ωt)
The resultant wave on the string is, according to the principle of superposition:
y (x, t) = y1(x, t) + y2(x, t)
= a [sin (kx – ωt) + sin (kx + ωt)]
Using the familiar trignometric identity
Sin (A+B) + Sin (A–B) = 2 sin A cosB we get,
y (x, t) = 2a sin kx cos ωt (15.37)
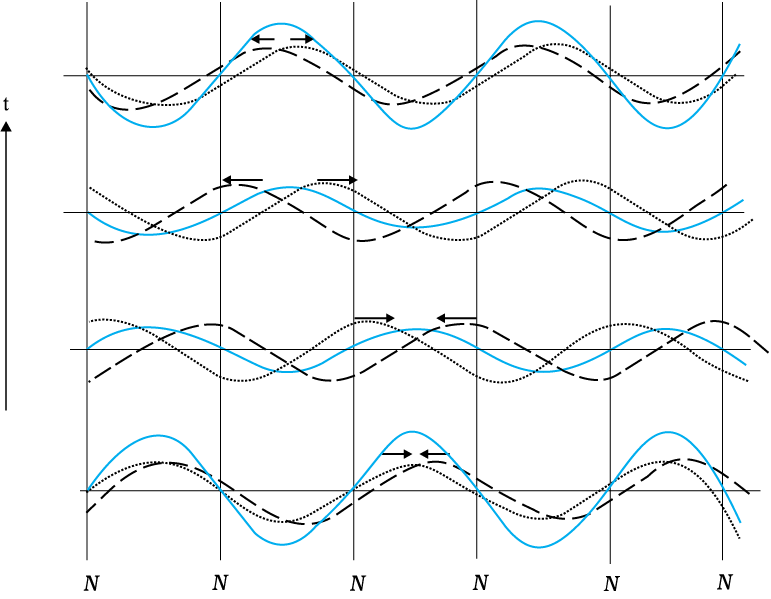
Note the important difference in the wave pattern described by Eq. (15.37) from that described by Eq. (15.2) or Eq. (15.4). The terms kx and ωt appear separately, not in the combination kx - ωt. The amplitude of this wave is 2a sin kx. Thus, in this wave pattern, the amplitude varies from point-to-point, but each element of the string oscillates with the same angular frequency ω or time period. There is no phase difference between oscillations of different elements of the wave. The string as a whole vibrates in phase with differing amplitudes at different points. The wave pattern is neither moving to the right nor to the left. Hence, they are called standing or stationary waves. The amplitude is fixed at a given location but, as remarked earlier, it is different at different locations. The points at which the amplitude is zero (i.e., where there is no motion at all) are nodes; the points at which the amplitude is the largest are called antinodes. Fig. 15.12 shows a stationary wave pattern resulting from superposition of two travelling waves in opposite directions.
The most significant feature of stationary waves is that the boundary conditions constrain the possible wavelengths or frequencies of vibration of the system. The system cannot oscillate with any arbitrary frequency (contrast this with a harmonic travelling wave), but is characterised by a set of natural frequencies or normal modes of oscillation. Let us determine these normal modes for a stretched string fixed at both ends.
First, from Eq. (15.37), the positions of nodes (where the amplitude is zero) are given by
sin kx = 0 .
which implies
kx = nπ; n = 0, 1, 2, 3, ...
Since, k = 2π/λ , we get
x = ; n = 0, 1, 2, 3, ... (15.38)
Clearly, the distance between any two successive nodes is . In the same way, the positions of antinodes (where the amplitude is the largest) are given by the largest value of sin kx :
sin kx = 1
which implies
kx = (n + ½) π ; n = 0, 1, 2, 3, ...
With k = 2π/λ, we get
x = (n + ½)λ/2 ; n = 0, 1, 2, 3, ... (15.39)
Again the distance between any two consecutive antinodes is . Eq. (15.38) can be applied to the case of a stretched string of length L fixed at both ends. Taking one end to be at x = 0, the boundary conditions are that x = 0 and x = L are positions of nodes. The x = 0 condition is already satisfied. The x = L node condition requires that the length L is related to λ by
L = n ; n = 1, 2, 3, ... (15.40)
Thus, the possible wavelengths of stationary waves are constrained by the relation
λ = ; n = 1, 2, 3, … (15.41)
with corresponding frequencies
v = , for n = 1, 2, 3, (15.42)
We have thus obtained the natural frequencies - the normal modes of oscillation of the system. The lowest possible natural frequency of a system is called its fundamental mode or the first harmonic. For the stretched string fixed at either end it is given by v = , corresponding to n = 1 of Eq. (15.42). Here v is the speed of wave determined by the properties of the medium. The n = 2 frequency is called the second harmonic; n = 3 is the third harmonic and so on. We can label the various harmonics by the symbol νn ( n = 1, 2, ...).
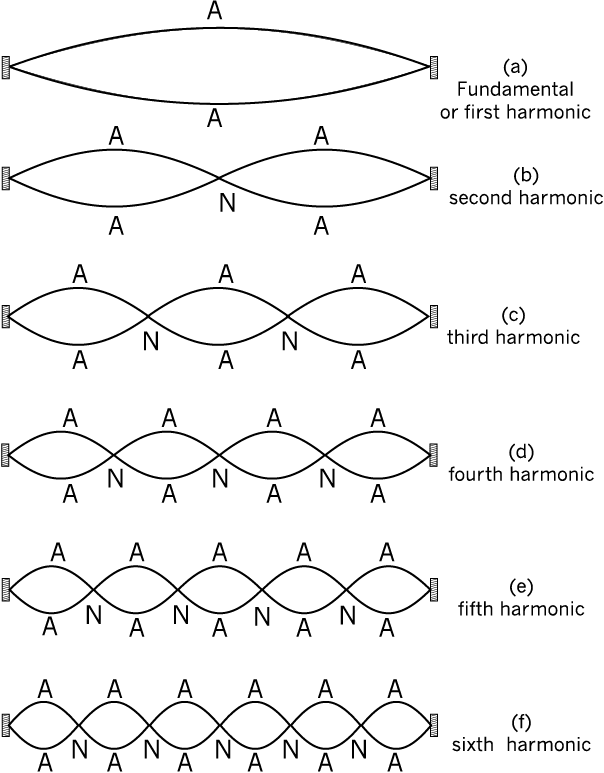
Fig. 15.13 The first six harmonics of vibrations of a stretched string fixed at both ends.
Fig. 15.13 shows the first six harmonics of a stretched string fixed at either end. A string need not vibrate in one of these modes only. Generally, the vibration of a string will be a superposition of different modes; some modes may be more strongly excited and some less. Musical instruments like sitar or violin are based on this principle. Where the string is plucked or bowed, determines which modes are more prominent than others.
Let us next consider normal modes of oscillation of an air column with one end closed and the other open. A glass tube partially filled with water illustrates this system. The end in contact with water is a node, while the open end is an antinode. At the node the pressure changes are the largest, while the displacement is minimum (zero). At the open end - the antinode, it is just the other way - least pressure change and maximum amplitude of displacement. Taking the end in contact with water to be x = 0, the node condition (Eq. 15.38) is already satisfied. If the other end x = L is an antinode, Eq. (15.39) gives
L = , for n = 0, 1, 2, 3, …
The possible wavelengths are then restricted by the relation :
λ = , for n = 0, 1, 2, 3,... (15.43)
The normal modes – the natural frequencies – of the system are
ν = ; n = 0, 1, 2, 3, ... (15.44)
The fundamental frequency corresponds to n = 0, and is given by . The higher frequencies are odd harmonics, i.e., odd multiples of the fundamental frequency : 3, 5, etc.
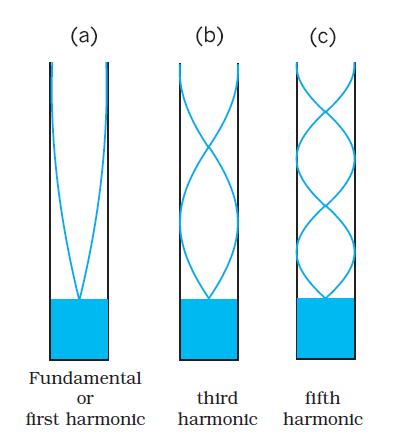
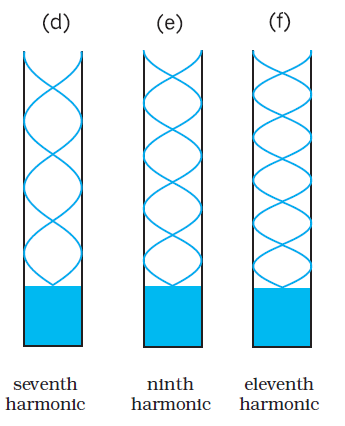
Fig. 15.14 Normal modes of an air column open at one end and closed at the other end. Only the odd harmonics are seen to be possible.
Fig. 15.14 shows the first six odd harmonics of air column with one end closed and the other open. For a pipe open at both ends, each end is an antinode. It is then easily seen that an open air column at both ends generates all harmonics (See Fig. 15.15).
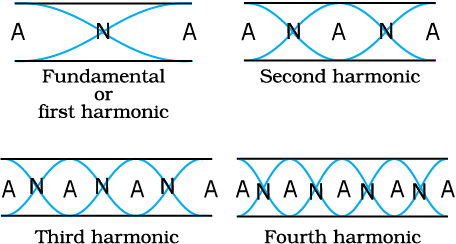
Fig. 15.15 Standing waves in an open pipe, first four harmonics are depicted.
The systems above, strings and air columns, can also undergo forced oscillations (Chapter 14). If the external frequency is close to one of the natural frequencies, the system shows resonance.
Normal modes of a circular membrane rigidly clamped to the circumference as in a tabla are determined by the boundary condition that no point on the circumference of the membrane vibrates. Estimation of the frequencies of normal modes of this system is more complex. This problem involves wave propagation in two dimensions. However, the underlying physics is the same.
Example 15.5 A pipe, 30.0 cm long, is open at both ends. Which harmonic mode of the pipe resonates a 1.1 kHz source? Will resonance with the same source be observed if one end of the pipe is closed ? Take the speed of sound in air as
330 m s–1.
Answer
The first harmonic frequency is given by
ν1 = (open pipe)
where L is the length of the pipe. The frequency of its nth harmonic is:
νn = , for n = 1, 2, 3, ... (open pipe)
First few modes of an open pipe are shown in Fig. 15.15.
For L = 30.0 cm, v = 330 m s–1,
νn = = 550 n s–1
Clearly, a source of frequency 1.1 kHz will resonate at v2, i.e. the second harmonic.
Now if one end of the pipe is closed (Fig. 15.15), it follows from Eq. (14.50) that the fundamental frequency is
ν1 = (pipe closed at one end)
and only the odd numbered harmonics are present :
ν3 = , ν5 = , and so on.
For L = 30 cm and v = 330 m s–1, the fundamental frequency of the pipe closed at one end is 275 Hz and the source frequency corresponds to its fourth harmonic. Since this harmonic is not a possible mode, no resonance will be observed with the source, the moment one end is closed.
‘Beats’ is an interesting phenomenon arising from interference of waves. When two harmonic sound waves of close (but not equal) frequencies are heard at the same time, we hear a sound of similar frequency (the average of two close frequencies), but we hear something else also. We hear audibly distinct waxing and waning of the intensity of the sound, with a frequency equal to the difference in the two close frequencies. Artists use this phenomenon often while tuning their instruments with each other. They go on tuning until their sensitive ears do not detect any beats.
To see this mathematically, let us consider two harmonic sound waves of nearly equal angular frequency ω1 and ω2 and fix the location to be x = 0 for convenience. Eq. (15.2) with a suitable choice of phase (φ = π/2 for each) and, assuming equal amplitudes, gives
s1 = a cos ω1t and s2 = a cos ω2t (15.45)
Here we have replaced the symbol y by s, since we are referring to longitudinal not transverse displacement. Let ω1 be the (slightly) greater of the two frequencies. The resultant displacement is, by the principle of superposition,
s = s1 + s2 = a (cos ω1 t + cos ω2 t)
Using the familiar trignometric identity for
cos A + cosB, we get
 (15.46)
(15.46)
which may be written as :
s = [2 a cos ωb t] cos ωat (15.47)
If |ω1 – ω2| <<ω1, ω2, ωa >> ωb, th
where
ωb =  and ωa =
and ωa = 
Now if we assume |ω1 – ω2| <<ω1 , which means ωa >> ωb, we can interpret Eq. (15.47) as follows. The resultant wave is oscillating with the average angular frequency ωa; however its amplitude is not constant in time, unlike a pure harmonic wave. The amplitude is the largest when the term cos ωb t takes its limit +1 or –1. In other words, the intensity of the resultant wave waxes and wanes with a frequency which is 2ωb = ω1 – ω2. Since ω = 2πν, the beat frequency νbeat, is given by
νbeat = ν1 – ν2 (15.48)
Fig. 15.16 illustrates the phenomenon of beats for two harmonic waves of frequencies 11 Hz and 9 Hz. The amplitude of the resultant wave shows beats at a frequency of 2 Hz.
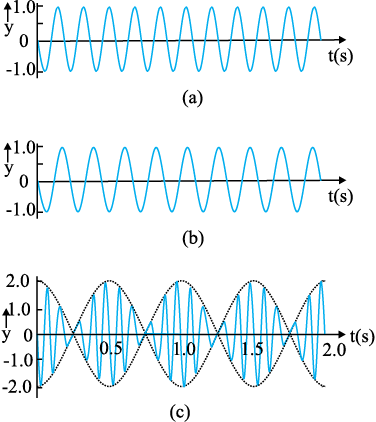
Fig. 15.16 Superposition of two harmonic waves, one of frequency 11 Hz (a), and the other of frequency 9Hz (b), giving rise to beats of frequency 2 Hz, as shown in (c).
Example 15.6 Two sitar strings A and B playing the note ‘Dha’ are slightly out of tune and produce beats of frequency 5 Hz. The tension of the string B is slightly increased and the beat frequency is found to decrease to 3 Hz. What is the original frequency of B if the frequency of A is 427 Hz ?
Answer
Increase in the tension of a string increases its frequency. If the original frequency of B (νB) were greater than that of A (νA ), further increase in νB should have resulted in an increase in the beat frequency. But the beat frequency is found to decrease. This shows that νB < νA. Since νA – νB = 5 Hz, and νA = 427 Hz, we get νB = 422 Hz.

Temples often have some pillars portraying human figures playing musical instru- ments, but seldom do these pillars themselves produce music. At the Nellaiappar temple in Tamil Nadu, gentle taps on a cluster of pillars carved out of a single piece of rock produce the basic notes of Indian classical music, viz. Sa, Re, Ga, Ma, Pa, Dha, Ni, Sa. Vibrations of these pillars depend on elasticity of the stone used, its density and shape.
Musical pillars are categorised into three types: The first is called the Shruti Pillar, as it can produce the basic notes — the “swaras”. The second type is the Gana Thoongal, which generates the basic tunes that make up the “ragas”. The third variety is the Laya Thoongal pillars that produce “taal” (beats) when tapped. The pillars at the Nellaiappar temple are a combination of the Shruti and Laya types.
Archaeologists date the Nelliappar temple to the 7th century and claim it was built by successive rulers of the Pandyan dynasty.
The musical pillars of Nelliappar and several other temples in southern India like those at Hampi (picture), Kanyakumari, and Thiruvananthapuram are unique to the country and have no parallel in any other part of the world.
We shall analyse changes in frequency under three different situations: (1) observer is stationary but the source is moving, (2) observer is moving but the source is stationary, and (3) both the observer and the source are moving. The situations (1) and (2) differ from each other because of the absence or presence of relative motion between the observer and the medium. Most waves require a medium for their propagation; however, electromagnetic waves do not require any medium for propagation. If there is no medium present, the Doppler shifts are same irrespective of whether the source moves or the observer moves, since there is no way of distinction between the two situations.

When a high pressure pulse of air travelling down an open pipe reaches the other end, its momentum drags the air out into the open, where pressure falls rapidly to the atmospheric pressure. As a result the air following after it in the tube is pushed out. The low pressure at the end of the tube draws air from further up the tube. The air gets drawn towards the open end forcing the low pressure region to move upwards. As a result a pulse of high pressure air travelling down the tube turns into a pulse of low pressure air travelling up the tube. We say a pressure wave has been reflected at the open end with a change in phase of 1800. Standing waves in an open pipe organ like the flute is a result of this phenomenon.
Compare this with what happens when a pulse of high pressure air arrives at a closed end: it collides and as a result pushes the air back in the opposite direction. Here, we say that the pressure wave is reflected, with no change in phase.
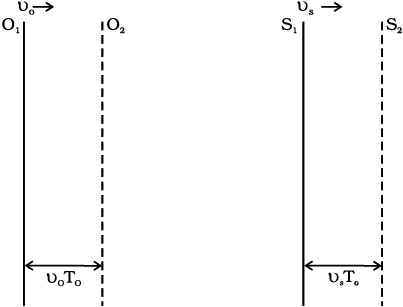
Let us choose the convention to take the direction from the observer to the source as the positive direction of velocity. Consider a source S moving with velocity vs and an observer who is stationary in a frame in which the medium is also at rest. Let the speed of a wave of angular frequency ω and period To, both measured by an observer at rest with respect to the medium, be v. We assume that the observer has a detector that counts every time a wave crest reaches it. As shown in
Fig. 15.17, at time t = 0 the source is at point S1, located at a distance L from the observer, and emits a crest. This reaches the observer at time t1 = L/v. At time t = To the source has moved a distance vsToand is at point S2, located at a distance (L + vsTo) from the observer. At S2, the source emits a second crest. This reaches the observer at
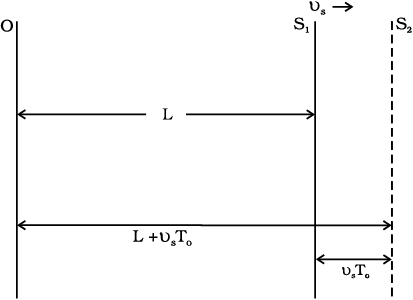
Fig. 15.17 Doppler effect (change in frequency of wave) detected when the source is moving and the observer is at rest in the medium.
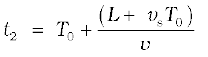
At time n To, the source emits its (n+1)th crest and this reaches the observer at time
Hence, in a time interval
the observer’s detector counts n crests and the observer records the period of the wave as T given by
= 
=  (15.49)
(15.49)
Equation (15.49) may be rewritten in terms of the frequency vo that would be measured if the source and observer were stationary, and the frequency v observed when the source is moving, as
v =  (15.50)
(15.50)
If vs is small compared with the wave speed v, taking binomial expansion to terms in first order in vs/v and neglecting higher power, Eq. (15.50) may be approximated, giving
v =  (15.51)
(15.51)
For a source approaching the observer, we replace vs by – vs to get
v =  (15.52)
(15.52)
The observer thus measures a lower frequency when the source recedes from him than he does when it is at rest. He measures a higher frequency when the source approaches him.
Now to derive the Doppler shift when the observer is moving with velocity vo towards the source and the source is at rest, we have to proceed in a different manner. We work in the reference frame of the moving observer. In this reference frame the source and medium are approaching at speed vo and the speed with which the wave approaches is vo + v. Following a similar procedure as in the previous case, we find that the time interval between the arrival of the first and the (n+1) th crests is
The observer thus, measures the period of the wave to be
giving
v =  (15.53)
(15.53)
If  is small, the Doppler shift is almost same whether it is the observer or the source moving since Eq. (15.53) and the approximate relation Eq. (15.51 ) are the same.
is small, the Doppler shift is almost same whether it is the observer or the source moving since Eq. (15.53) and the approximate relation Eq. (15.51 ) are the same.
We will now derive a general expression for Doppler shift when both the source and the observer are moving. As before, let us take the direction from the observer to the source as the positive direction. Let the source and the observer be moving with velocities vs and vo respectively as shown in Fig.15.18. Suppose at time t = 0, the observer is at O1 and the source is at S1, O1 being to the left of S1. The source emits a wave of velocity v, of frequency v and period T0 all measured by an observer at rest with respect to the medium. Let L be the distance between O1 and S1 at t = 0, when the source emits the first crest. Now, since the observer is moving, the velocity of the wave relative to the observer is v+v0. Therefore, the first crest reaches the observer at time t1 = L/(v+vo). At time t = T0, both the observer and the source have moved to their new positions O2 and S2 respectively. The new distance between the observer and the source, O2 S2, would be L+(vs –vo) T0]. At S2, the source emits a second crest.
This reaches the observer at time.
t2 = T0 + [L + (vs – vo)T0)] /(v + vo)
At time nTo the source emits its (n+1) th crest and this reaches the observer at time
tn+1 = nT0 + [L + n (vs – vo)T0)] /(v + vo)
Hence, in a time interval tn+1 –t1, i.e.,
nTo + [L + n (vs – vo)T0)] /(v + vo) – L /(v +vo),
the observer counts n crests and the observer records the period of the wave as equal to T given by
(15.54)
The frequency v observed by the observer is given by
 (15.55)
(15.55)
Consider a passenger sitting in a train moving on a straight track. Suppose she hears a whistle sounded by the driver of the train. What frequency will she measure or hear? Here both the observer and the source are moving with the same velocity, so there will be no shift in frequency and the passenger will note the natural frequency. But an observer outside who is stationary with respect to the track will note a higher frequency if the train is approaching him and a lower frequency when it recedes from him.
Note that we have defined the direction from the observer to the source as the positive direction. Therefore, if the observer is moving towards the source, vo has a positive (numerical) value whereas if O is moving away from S, vo has a negative value. On the other hand, if S is moving away from O, vs has a positive value whereas if it is moving towards O, vs has a negative value. The sound emitted by the source travels in all directions. It is that part of sound coming towards the observer which the observer receives and detects. Therefore, the relative velocity of sound with respect to the observer is v+vo in all cases.
Example 15.7 A rocket is moving at a speed of 200 m s–1 towards a stationary target. While moving, it emits a wave of frequency 1000 Hz. Some of the sound reaching the target gets reflected back to the rocket as an echo. Calculate (1) the frequency of the sound as detected by the target and (2) the frequency of the echo as detected by the rocket.
Answer
(1) The observer is at rest and the source is moving with a speed of 200 ms–1. Since this is comparable with the velocity of sound, 330 m s–1, we must use Eq. (15.50) and not the approximate Eq. (15.51). Since the source is approaching a stationary target, vo = 0, and vs must be replaced by –vs. Thus, we have
v = 1000 Hz × [1 – 200 m s–1/330 ms–1]–1
= 2540 Hz
(2) The target is now the source (because it is the source of echo) and the rocket’s detector is now the detector or observer (because it detects echo). Thus, vs = 0 and vo has a positive value. The frequency of the sound emitted by the source (the target) is v, the frequency intercepted by the target and not vo. Therefore, the frequency as registered by the rocket is
v′ =

4080 Hz
The change in frequency caused by a moving object due to Doppler effect is used to measure their velocities in diverse areas such as military, medical science, astrophysics, etc. It is also used by police to check over-speeding of vehicles.
A sound wave or electromagnetic wave of known frequency is sent towards a moving object. Some part of the wave is reflected from the object and its frequency is detected by the monitoring station. This change in frequency is called Doppler shift.
It is used at airports to guide aircraft, and in the military to detect enemy aircraft. Astrophysicists use it to measure the velocities of stars.
Doctors use it to study heart beats and blood flow in different parts of the body. Here they use ulltrasonic waves, and in common practice, it is called sonography. Ultrasonic waves enter the body of the person, some of them are reflected back, and give information about motion of blood and pulsation of heart valves, as well as pulsation of the heart of the foetus. In the case of heart, the picture generated is called echocardiogram.
1. Mechanical waves can exist in material media and are governed by Newton’s Laws.
2. Transverse waves are waves in which the particles of the medium oscillate perpendicular to the direction of wave propagation.
3. Longitudinal waves are waves in which the particles of the medium oscillate along the direction of wave propagation.
4. Progressive wave is a wave that moves from one point of medium to another.
5. The displacement in a sinusoidal wave propagating in the positive x direction is given by
y (x, t) = a sin (kx – ωt + φ)
where a is the amplitude of the wave, k is the angular wave number, ω is the angular frequency, (kx – ωt + φ) is the phase, and φ is the phase constant or phase angle.
6. Wavelength λ of a progressive wave is the distance between two consecutive points of the same phase at a given time. In a stationary wave, it is twice the distance between two consecutive nodes or antinodes.
7. Period T of oscillation of a wave is defined as the time any element of the medium takes to move through one complete oscillation. It is related to the angular frequencyω through the relation

8. Frequency v of a wave is defined as 1/T and is related to angular frequency by

9. Speed of a progressive wave is given by 
10. The speed of a transverse wave on a stretched string is set by the properties of the string. The speed on a string with tension T and linear mass density µ is

11. Sound waves are longitudinal mechanical waves that can travel through solids, liquids, or gases. The speed v of sound wave in a fluid having bulk modulus B and density ρ is

The speed of longitudinal waves in a metallic bar is

For gases, since B = γP, the speed of sound is

12. When two or more waves traverse simultaneously in the same medium, the displacement of any element of the medium is the algebraic sum of the displacements due to each wave. This is known as the principle of superposition of waves
13. Two sinusoidal waves on the same string exhibit interference, adding or cancelling according to the principle of superposition. If the two are travelling in the same direction and have the same amplitude a and frequency but differ in phase by a phase constant φ, the result is a single wave with the same frequency ω :
y (x, t) = 
If φ = 0 or an integral multiple of 2π, the waves are exactly in phase and the interference is constructive; if φ = π, they are exactly out of phase and the interference is destructive.
14. A travelling wave, at a rigid boundary or a closed end, is reflected with a phase reversal but the reflection at an open boundary takes place without any phase change.
For an incident wave
yi (x, t) = a sin (kx – ωt )
the reflected wave at a rigid boundary is
yr (x, t) = – a sin (kx + ωt )
For reflection at an open boundary
yr (x,t ) = a sin (kx + ωt)
15. The interference of two identical waves moving in opposite directions produces standing waves. For a string with fixed ends, the standing wave is given by
y (x, t) = [2a sin kx ] cos ωt
Standing waves are characterised by fixed locations of zero displacement called nodes and fixed locations of maximum displacements called antinodes. The separation between two consecutive nodes or antinodes is λ/2.
A stretched string of length L fixed at both the ends vibrates with frequencies given by
v  n = 1, 2, 3, ...
n = 1, 2, 3, ...
The set of frequencies given by the above relation are called the normal modes of oscillation of the system. The oscillation mode with lowest frequency is called the fundamental mode or the first harmonic. The second harmonic is the oscillation mode with n = 2 and so on.
A pipe of length L with one end closed and other end open (such as air columns) vibrates with frequencies given by
v  , n = 0, 1, 2, 3, ...
, n = 0, 1, 2, 3, ...
The set of frequencies represented by the above relation are the normal modes of oscillation of such a system. The lowest frequency given by v/4L is the fundamental mode or the first harmonic.
16. A string of length L fixed at both ends or an air column closed at one end and open at the other end or open at both the ends, vibrates with certain frequencies called their normal modes. Each of these frequencies is a resonant frequency of the system.
17. Beats arise when two waves having slightly different frequencies, ν1 and ν2 and comparable amplitudes, are superposed. The beat frequency is
νbeat = ν1 ~ ν2
18. The Doppler effect is a change in the observed frequency of a wave when the source (S) or the observer (O) or both move(s) relative to the medium. For sound the observed frequency ν is given in terms of the source frequency νo by
v = vo 
here v is the speed of sound through the medium, vo is the velocity of observer relative to the medium, and vs is the source velocity relative to the medium. In using this formula, velocities in the direction OS should be treated as positive and those opposite to it should be taken to be negative.
1. A wave is not a motion of matter as a whole in a medium. The wind is different from the sound wave in the air. The former involves motion of air from one place to the other. The latter involves compressions and rarefactions of layers of air.
2. In a wave, energy and not the matter is transferred from one point to the other.
3. In a mechanical wave, energy transfer takes place because of the coupling through elastic forces between neighbouring oscillating parts of the medium.
4. Transverse waves can propagate only in medium with the shear modulus of elasticity. Longitudinal waves need bulk modulus of elasticity and are, therefore, possible in all media, solids, liquids and gases.
5. In a harmonic progressive wave of a given frequency, all particles have the same amplitude but different phases at a given instant of time. In a stationary wave, all particles between two nodes have the same phase at a given instant but have different amplitudes.
6. Relative to an observer at rest in a medium the speed of a mechanical wave in that medium (v) depends only on elastic and other properties (such as mass density) of the medium. It does not depend on the velocity of the source.
7. For an observer moving with velocity relative to the medium, the speed of a wave is obviously different from v and is given by .
Exercises
15.1 A string of mass 2.50 kg is under a tension of 200 N. The length of the stretched string is 20.0 m. If the transverse jerk is struck at one end of the string, how long does the disturbance take to reach the other end?
NEETprep Answer15.2 A stone dropped from the top of a tower of height 300 m splashes into the water of a pond near the base of the tower. When is the splash heard at the top given that the speed of sound in air is 340 m/sec?
NEETprep Answer15.3 A steel wire has a length of 12.0 m and a mass of 2.10 kg. What should be the tension in the wire so that the speed of a transverse wave on the wire equals the speed of sound in dry air at 20°C = 343 m/sec.
NEETprep Answer15.4 Use the formula to explain why the speed of sound in air
(a) is independent of pressure,
(b) increases with temperature,
(c) increases with humidity.
NEETprep Answer15.5 You have learnt that a travelling wave in one dimension is represented by a function y = f(x, t) where x and t must appear in the combination or , i.e. . Is the converse true? Examine if the following functions for y can possibly represent a travelling wave :
NEETprep Answer
15.6 A bat emits an ultrasonic sound of frequency 1000 kHz in air. If the sound meets a water surface, what is the wavelength of (a) the reflected sound, (b) the transmitted sound? Speed of sound in air is 340 m/sec and in water 1486 m/sec.
NEETprep Answer15.7 A hospital uses an ultrasonic scanner to locate tumours in a tissue. What is the wavelength of sound in the tissue in which the speed of sound is 1.7 km/s? The operating frequency of the scanner is 4.2 MHz.
NEETprep Answer15.8 A transverse harmonic wave on a string is described by where x and y are in cm and t in sec. The positive direction of x is from left to right.
(a) Is this a travelling wave or a stationary wave?
If it is travelling, what are the speed and direction of its propagation?
(b) What are its amplitude and frequency?
(c) What is the initial phase at the origin?
(d) What is the least distance between two successive crests in the wave?
NEETprep Answer15.9 For the wave described in Exercise 15.8, plot the displacement (y) versus (t) graphs for x = 0, 2 and 4 cm. What are the shapes of these graphs? In which aspects does the oscillatory motion in the travelling wave differ from one point to another: amplitude, frequency or phase?
NEETprep Answer15.10 For the travelling harmonic wave
where x and y are in cm and t in sec. Calculate the phase difference between the oscillatory motion of two points separated by a distance of
(a) 4 m,
(b) 0.5 m,
(c) λ/2,
(d) 3λ/4
15.11 The transverse displacement of a string (clamped at its both ends) is given by
where x and y are in m and t in sec. The length of the string is 1.5 m and its mass is kg.
Answer the following :
(a) Does the function represent a travelling wave or a stationary wave?
(b) Interpret the wave as a superposition of two waves travelling in opposite directions. What is the wavelength, frequency, and speed of each wave?
(c) Determine the tension in the string.
NEETprep Answer15.12 (i) For the wave on a string described in Exercise 15.11, do all the points on the string oscillate with the same (a) frequency, (b) phase, (c) amplitude? Explain your answers. (ii) What is the amplitude of a point 0.375 m away from one end?
NEETprep Answer15.13 Given below are some functions of x and t to represent the displacement (transverse or longitudinal) of an elastic wave. State which of these represent (i) a travelling wave, (ii) a stationary wave or (iii) none at all:
(a)
(b)
(c)
(d)
NEETprep Answer15.14 A wire stretched between two rigid supports vibrates in its fundamental mode with a frequency of 45 Hz. The mass of the wire is kg and its linear mass density is kg/m. What is:
(a) the speed of a transverse wave on the string, and
(b) the tension in the string?
15.15 A one metre-long tube open at one end, with a movable piston at the other end, shows resonance with a fixed frequency source (a tuning fork of frequency 340 Hz) when the tube length is 25.5 cm or 79.3 cm. Estimate the speed of sound in air at the temperature of the experiment. The edge effects may be neglected.
NEETprep Answer15.16 A steel rod 100 cm long is clamped at its middle. The fundamental frequency of the longitudinal vibrations of the rod is given to be 2.53 kHz. What is the speed of sound in steel?
NEETprep Answer15.17 A pipe 20 cm long is closed at one end. Which harmonic mode of the pipe is resonantly excited by a 430 Hz source? Will the same source be in resonance with the pipe if both ends are open? (speed of sound in air is 340 m/sec).
NEETprep Answer15.18 Two sitar strings A and B playing the note ‘Ga’ are slightly out of tune and produce beats of frequency 6 Hz. The tension in the string A is slightly reduced and the beat frequency is found to be reduced to 3 Hz. If the original frequency of A is 324 Hz, what is the frequency of B?
NEETprep Answer15.19 Explain why (or how):
(a) in a sound wave, a displacement node is a pressure antinode and vice versa?
(b) bats can ascertain distances, directions, nature, and sizes of the obstacles without any “eyes”?
(c) a violin note and sitar note may have the same frequency, yet we can distinguish between the two notes?
(d) solids can support both longitudinal and transverse waves, but only longitudinal waves can propagate in gases?
(e) the shape of a pulse gets distorted during propagation in a dispersive medium?
NEETprep Answer15.20 A train, standing at the outer signal of a railway station blows a whistle of frequency 400 Hz in still air. (i) What is the frequency of the whistle for a platform observer when the train (a) approaches the platform with a speed of 10 m/sec, (b) recedes from the platform with a speed of 10 m/sec? (ii) What is the speed of sound in each case? The speed of sound in still air can be taken as 340 m/sec.
15.21 A train, standing in a station-yard, blows a whistle of frequency 400 Hz in still air. The wind starts blowing in the direction from the yard to the station with a speed of 10 m/sec. What are the frequency, wavelength, and speed of sound for an observer standing on the station’s platform? Is the situation exactly identical to the case when the air is still and the observer runs towards the yard at a speed of 10 m/sec? The speed of sound in still air can be taken as 340 m/sec.
NEETprep AnswerAdditional Exercises
15.22 A travelling harmonic wave on a string is described by .
(a) what are the displacement and velocity of oscillation of a point at x = 1 cm, and t = 1 sec? Is this velocity equal to the velocity of wave propagation?
(b) Locate the points of the string which have the same transverse displacements and velocity as that of point at x = 1 cm and t = 2 s, 5 s and 11 s.
NEETprep Answer15.23 A narrow sound pulse (for example, a short pip by a whistle) is sent across a medium. (a) Does the pulse have a definite (i) frequency, (ii) wavelength, (iii) speed of propagation? (b) If the pulse rate is 1 after every 20 s, (that is the whistle is blown for a split of second after every 20 s), is the frequency of the note produced by the whistle equal to 1/20 or 0.05 Hz?
NEETprep Answer15.24 One end of a long string of linear mass density is connected to an electrically driven tuning fork of frequency 256 Hz. The other end passes over a pulley and is tied to a pan containing a mass of 90 kg. The pulley end absorbs all the incoming energy so that reflected waves at this end have negligible amplitude. At t = 0, the left end (fork end) of the string x = 0 has zero transverse displacement (y = 0) and is moving along positive y-direction. The amplitude of the wave is 5.0 cm. Write down the transverse displacement y as a function of x and t that describes the wave on the string.
NEETprep Answer15.25 A SONAR system fixed in a submarine operates at a frequency 40.0 kHz. An enemy submarine moves towards the SONAR with a speed of 360 km/h. What is the frequency of sound reflected by the submarine? Take the speed of sound in water to be 1450 m/sec.
NEETprep Answer15.26 Earthquakes generate sound waves inside the earth. Unlike a gas, the earth can experience both transverse (S) and longitudinal (P) sound waves. Typically the speed of S wave is about 4.0 km/s, and that of the P waves is 8.0 km/s. A seismograph records P and S waves from an earthquake. The first P wave arrives 4 min before the first S wave. Assuming the waves travel in a straight line, at what distance does the earthquake occur?
NEETprep Answer15.27 A bat is flitting about in a cave, navigating via ultrasonic beeps. Assume that the sound emission frequency of the bat is 40 kHz. During one fast swoop directly toward a flat wall surface, the bat is moving at 0.03 times the speed of sound in air. What frequency does the bat hear reflected off the wall ?
NEETprep AnswerExemplar questions
Question 1: Water waves produced by a motorboat sailing in water are
1. neither longitudinal nor transverse
2. both longitudinal and transverse
3. only longitudinal
4. only transverse
Question 2: Sound waves of wavelength travelling in a medium with a speed of v m/s enter into another medium where its in 2v m/s. Wavelength of sound waves in the second medium is
1.
2.
3.
4.
Question 3: Speed of sound wave in air
1. is independent of temperature
2. increases with pressure
3. increases with increase in humidity
4. decreases with increase in humidity
Question 4: Change in temperature of the medium change
1. frequency of sound waves
2. amplitude of sound waves
3. wavelength of sound waves
4. loudness of sound waves
Question 5: With propagation of longitudinal waves through a medium, the quantity transmitted is
1. matter
2. energy
3. energy and matter
4. energy, matter and momentum
Question 6: Which of the following statements are true for wave motion?
1. Mechanical transverse waves can propagate through all mediums
2. Longitudinal waves can propagate through solids only
3. Mechanical transverse waves can propagate through solids only
4. Longitudinal waves can propagate through vacum
Question 7: A sound wave is passing through air column in the form of compression and rarefaction. In consecutive compressions and rarefactions,
1. density remains constant
2. Boyle's law is obeyed
3. bulk modulus of air oscillates
4. there is no transfer of heat
Question 8: Equation of a plane progressive wave is given by . On reflection from a denser medium its amplitude becomes of the amplitude of the incident wave. The equation of the reflected wave is
1.
2.
3.
4.
Question 9: A string of mass 2.5 kg is under tension of 200 N. the length of the stretched string is 20.0 m. If the transverse jerk is struck at one end of the string, the disturbance will reach the other end in
1. 1s
2. 0.5s
3. 2s
4. data given is insufficient
Question 10: A train whistling at constant frequency is moving towards a station at a constant speed v. The train goes past a stationary observer on the station. The frequency n' of the sound as heard by the observer is plotted as a function of time t (figure). Identify the expected curve.
1. 


Exemplar questions
Question 11: A transverse harmonic wave on a string is described by
Where x and y in cm and t is in sec. The positive direction of x is from left to right.
1. the wavw is travelling from right to left
2. the speed of the wave is 20 m/s
3. frequency of the wave is 5.7 Hz
4. the least distance between two successive crests in the wave is 2.5 cm
Question 12: The displacement of string is given by
where x and y are in metre and t in second. The length of the string is 1.5m and its mass is
1. it represents a progressive wave of frequency 60 Hz
2. it represents a stationary wave of frequency 60 Hz
3. it is the result superposition of two waves of wavelength 3m, frequency 60 Hz each travelling with a speed of 180 m/s in opposite direction
4. Amplitude of this wave is constant
Question 13: Speed of sound in a fluid upon
1. directly on density of the medium
2. square of Bulk modulus of the medium
3. inversly on the square root of density
4. directly on the square root of bulk modulus of the medium
Question 14: During propagation of a plane progressive mechanical wave,
1. all the particles are vibrating in the same phase
2. amplitude of all the particles is equal
3. particles of the medium executes SHM
4. wave velocity depends upon the nature of the medium
Question 15: The transverse displacement of a string (clamed at its both ends) is given by .
All the points on the string between two consecutive nodes vibrate with
1. same frequency
2. same phase
3. same energy
4. different amplitude
Question 16: A train , standing in a station yard, blows a whistle of frequency 400Hz in still air. The wind stars blowing in the direction from from the yard to the station with a speed of 10 m/s. Given that the speed of sound in still sir is 340 m/s. Then
1. the frquency of sound as heard by an observer standing on the platform is 400Hz
2. the speed of sound for the observer standing on the platform is 350 m/s
3. the frequency of sound as heard by the observer standing on the platform will increase
4. the frequency of sound as heard by the observer standing on the platform will decrease.
Question 17: Which of the following statement are true for a stationary waves?
1. Every particle has a fixed amplitude which is different from the amplitude of its nearest particle
2. All the particles cross their mean position at the same time
3. All the particles are oscillating with the same amplitude
4. There is no net transfer of energy across any plane
5. There are some particle which are always at rest
Question 18: A sonometer wire is vibrating in resonance with a tuning fork. keeping the tension applied same , the length of the wire is doubled. Under what condition would the tuning fork still be is resonance with the wire?
Question 19: An organ pipe of length L open at both ends is found to vibrate in its first harmonic when sounded with a tuning fork of 480 Hz. What should be the length of a pipe closed at one end, so that it also vibrates in its first harmonic with the same tuning fork?
Question 20: A tuning fork A, marked 512 Hz , produces 5 beats per second, where sounded with another unmarked tuning fork B. if B is loaded with wax the number of beats is again 5 per second. What is the frequency of the tuning fork B when not loaded?
Exemplar Questions
Question 21: The displacement of an elastic wave is given by the function where y is in cm t is in seconds. Calculate the resultant amplitude.
Question 22: A sitar wire is replaced by another wire of same length and material but of three times the earlier radius. If the tension in the remains the same, by what factor will the frequency change?
Question 23: At what temperatures (in ) will the speed of sound in air be 3 times its value at ?
Question 24: When two waves of almost equal frequencies and reach at a point simultaneously, what is the time interval between successive maxima?
Question 25: A steel wire has a length of 12 m and a mass of 2.10 kg. What will be the speed of a transverse wave on this wire when a tension of is applied?
Question 26: A pipe 20 cm long is closed at one end. Which harmonic mode of the pipe is resonantly excited by a source of 1237.5 Hz? (sound velocity in air = 330 )
Question 27: A train standing at the outer signal of a railway station blows a whistle of frequency 400Hz still air. The train begins to move with a speed of towards the platform. What is the frequency of the sound for an observer standing on the platform? (sound velocity in air = 330 )
Question 28: The wave pattern on a stretched string is shown in figure. Interpret what kind of wave of wave this is and find its wavelength.
Question 29: The pattern of standing waves formed on a stretched string at two instant of time are shown in figure. The velocity of two waves superimposing to form stationary waves is 360 and their frequency are 256 Hz.
1. Calculate the time at which the second curve is plotted.
2. Mark nodes and antinodes on the curve.
3. Calculate the distance between A' and C'.
Question 30: A tuning fork vibrating with a frequency of 512 Hz is kept close to the open end of a tube filled with water (figure). The water level in the tube is gradually lowered. When the water level is 17 cm below the open end, maximum intensity of sound is heard. If the room temperature is , calculate
1. Speed of sound in air at room temperature.
2. Speed of sound in air at .
3. If the water in the tube is replaced with mercury, will there be any difference in your observations?
Exemplar Questions
Question 31: Show that when a string fixed at its two ends vibrates in 1 loop, 2 loops, 3 loops and 4 loops, the frequencies are in the ratio 1:2:3:4.
Question 32. The earth has a radius of 6400 km. The inner core of 1000 km radius is solid. Outside it, there is a region from 1000 km to a radius of 3500 km which is in molten state. Then again from 3500 km to 6400 km the earth is solid. Only longitudinal (P) waves can travel inside a liquid.
Assume that the P wave has a speed of 8 km s-1 in solid parts and of 5 km s-1 in liquid parts of the earth. An earthquake occurs at some place close to the surrface of the earth. Calculate the time after which it will be recorded in a seismometer at a diamatrically opposite point on the earth, if wave travels along diameter?
Question. 33 If c is rms speed of molecules in a gas and v is the speed of sound waves in the gas, show that c/v is constant and independent of temperature for all diatomic gases.
Question. 34 Given below are some functions of x and t to represent the displacement of an elastis wave.
(i) y =5 cos(4x)sin(20t)
(ii) y = 4sin(5x- t /2) + 3cos(5x- t/2)
(iii)y = 10cos[(252- 250)
(iv) y = 100cos(
State which of these represent
(a) a travelling wave along-x- direction
(b) a stationary wave
(c) beats
(d) a travelling wave along-x direction
Given reasons for your answers.
Question 35: In the given progressive wave where y and x are in metre, t is in second. What is the
1. amplitude?
2. wavelength?
3. frequency?
4. wave velocity?
5. particle velocity amplitude?
Question 36: For the harmonic travelling wave where x and y are in cm and t is in second. What is the phase difference between the oscillatory motion at two points separated by a distance of
1. 4m
2. 0.5m
3.
4. (at a given instant of time)
5. What is the phase difference between the oscillation of a particle located at x=100cm, at t = T sec and t=5?

© 2026 GoodEd Technologies Pvt. Ltd.







